네이버의 기술연구개발 법인 네이버랩스는 30일 일산 킨텍스에서 열린 '2017 서울모터쇼' 프레스데이에서 자율주행차를 선보였다.

네이버랩스의 자율주행차는 지난달 20일 국내 IT기업으로는 처음으로 국토부 도로주행 임시운행 허가를 받아 현재 실제 도로에서 실험 주행 중이다. 미국자동차공학회의 자율주행 기준으로 레벨3 수준의 자율주행 기술을 갖춘 차다.

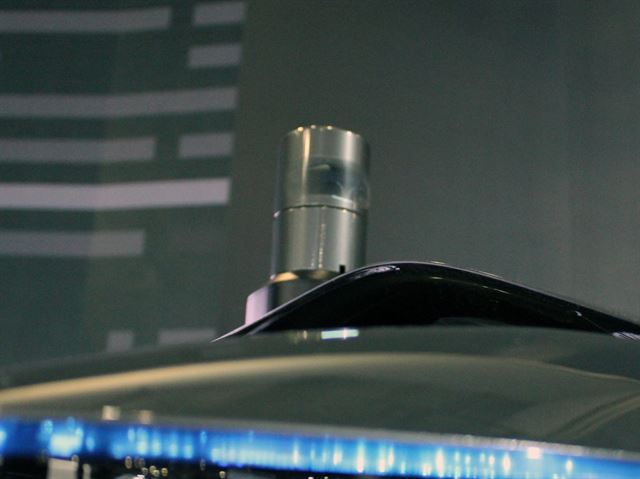
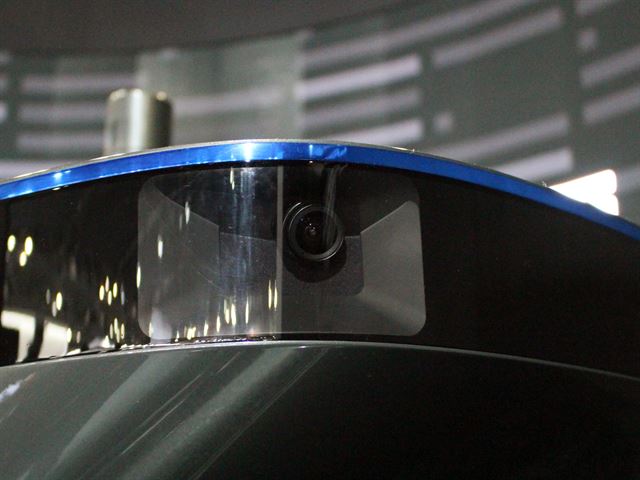
네이버랩스 자율주행의 핵심 기술은 라이다(LIDAR)와 레이더(RADAR), 카메라, GPS센서 등을 통한 도로환경 인지 기술을 비롯해 차종과 보행자의 형태와 그 움직임은 어떤지 분석하고 판단하는 머신 러닝 기술로 이뤄진다. 실제 자동차를 움직이는 제어 기술(LKAS)과 앞차의 속도에 맞춰 속도를 조절하거나 앞차가 급정거했을 때 차선을 바꿔 주행하는 기술(ACC·AEB) 또한 적용되어 있다.
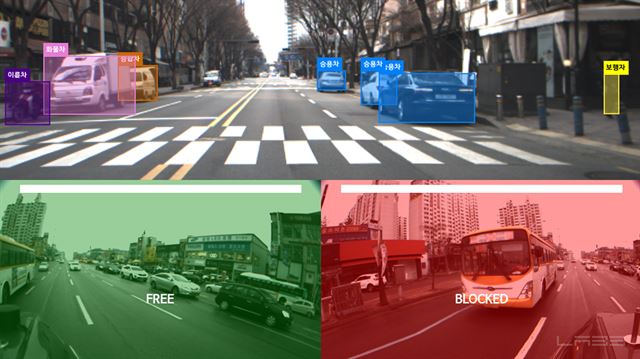
네이버랩스가 자율주행 기술에서 주목하는 건 ‘인지’ 분야다. 인지란 정밀한 자기 위치, 사물의 인식 및 분류, 상황의 판단 등 자율주행에서 핵심적인 감각기관과 두뇌의 역할을 말한다. 당연하게도 정보와 데이터의 분석 처리가 가장 중요한데, 이번 모터쇼에서 네이버랩스는 딥러닝 기반의 이미지 인식 기술을 선보였다. 도로 위 사물의 위치를 정밀하게 파악해 차량의 경로를 계획하고, 측후방 영상에서 빈 공간을 판단해 차선 변경 가능 여부를 확인하는 등의 기술이 그것.
송창현 대표는 "네이버랩스가 이미 역량을 키워왔던 비전 기술과 딥러닝 기술을 바탕으로 자율주행 분야의 연구개발에 매진하고 있다”며, “특히 기계학습 기반의 기술을 실제 차량 주행에 접목시키는 다양한 실험을 통해, 경제적이고도 정확도가 높은 인지 기술을 개발해 나가는 것이 네이버랩스만의 차별화된 경쟁력”이라고 말했다.

네이버랩스에 따르면 “자율주행 기술의 발전은 실제 도로 주행을 통한 경험과 데이터를 쌓는 것이 선행과제이기 때문에 실제 주행 거리를 늘려나갈 계획”이라고. 이를 통해 미래 이동성을 개선하고 도로 정보화 연구를 지속하며 다양한 파트너와 협업해 기술 수준을 더욱 높일 예정이다.
박혜연 기자 heyeun@hankookilbo.com
기사 URL이 복사되었습니다.
댓글0